「基幹工学部」「先進工学部」「建築学部」からなる、2018年4月に設置される3学部6学科2コースでは、一体どのような学びに触れることができるのだろうか。先進的かつ独自性豊かな研究を行う日本工業大学の教授陣に、研究内容や学問の魅力について聞いた。
【先進工学部/ロボティクス学科/樋口勝教授】
◆医学の道からロボット道へ
先進工学部は、ロボティクス工学科、情報メディア工学科の2学科で構成される学部。21世紀の産業の中核となると思われる人工知能(AI)を始めとした情報工学とロボット工学を基に機械・電気・情報に精通した先進的なエンジニアを養成する。そのうち、樋口教授が研究室を置くロボティクス学科では、人工知能(AI)やロボット技術など、未来へつながる先駆的分野について学ぶことができる。
「人の幸せのためにはものの作り方が重要である」との考えに基づき、ロボット設計を研究し続ける樋口教授に、学問のおもしろさについて紹介してもらった。

樋口研究室のようす
--まず、なぜ研究者の道を目指すようになったのか教えてください。
大工の棟梁であった祖父への憧れから、幼少のころの夢は宮大工になることでしたが、複数回の怪我による手術で同じ医師に完治してもらった経験から、大学は医学部を目指しました。しかし、夢かなわず、同じ怪我をした人を助けることのできる、装具や義肢、福祉機械を開発することを目指し機械工学科に進学したことが研究者になったきっかけです。
卒業研究で配属になった研究室は、福祉機械の開発を行っており、研究室の教授からは助手として研究室に残ることを勧められました。卒業研究の「移動補助歩行ロボット」の研究を完成させたかったことと、目指している装具や福祉機械の開発ができること、そして何より、人にものを教えることが好きだったので、修士修了後そのまま研究室に助手として勤めることにしました。
◆ロボットと人の可能性を融合
--ご自身の経験から医学、そしてロボット工学に興味を持たれたのが研究者への道の始まりだったのですね。現在はどのような研究を行っているのですか。
今、日本工業大学で主に研究しているのは、「スキルアシストシステム」の開発です。人の持つ、感性や繊細さ、理屈では説明できない“第六感”的な部分と、ロボットの持つ、繰り返し再現性の高さ、多くの情報の処理能力等を組合せることで、人だけでも、また、ロボットだけでも実現が難しい、より高度な作業を実現することを目的としています。
このシステムは、訓練システムとしても、また、誰でも容易に熟練者と同じ作業を実現する手段としても利用できると考えています。今は、このシステムに用いる「力覚提示装置(ハプティックデバイス)」の開発を行っています。具体的には、人に力を伝えるメカニズムとしてパラレル機構の設計や、これに用いるための、関節や減速機のような要素の開発も行っています。
それから、熟練作業者と同様の作業をロボットに行わせるための、熟練作業者の運動計測システムや、取得したデータからロボットの運動をつくるシステム、極限作業用の歩行ロボット、フロアポリッシャーのような円板型の回転ブラシのみで移動と洗浄を行う除染ロボットや、風呂掃除ロボット、お料理ロボット、バシリスクトカゲのように、足をばたつかせることだけで水面上を移動するロボット、スライムのように、柔軟に路面形状に対応して移動するロボットなどを研究しています。
 樋口研究室の研究内容「洗浄ロボット」
樋口研究室の研究内容「洗浄ロボット」◆震災から生まれた「極限作業用ロボット」の可能性
--「極限作業」「洗浄と除染」など、ものづくりの現場で活躍するロボットのイメージとは異なるキーワードがありますね。
日本工業大学には、東日本大震災のあった2011年の春、現場でのものづくりを重視する実工学教育に惹かれて着任しました。私は学生時代の卒業研究から「歩行椅子」という、搭乗形歩行支援ロボットの開発を行っており、その研究の中でパワーアシストシステムの研究も行いました。その過程で、人とロボットとが協調することで、より良いものづくりを実現することを考えるに至り、スキルアシストロボットの開発を始めました。
そんな中で始まった極限作業用ロボットの開発は、本学着任時が東日本大震災の直後であり、実際に使える極限作業用の歩行ロボットが必要だと考えたこと、また、着任時に、着任した学科には、専門分野の異なるロボットの教員が多く集まっていたこともあり、「学科としてのプロジェクトとして目玉になるロボット開発を行いたい」という、教員の思いがありました。
なので、この極限作業用ロボットは、ハードに関しては私が担当ですが、ほかのシステムは別の教員が担当しています。除染ロボットも同様に、震災の影響で研究し始めたテーマです。それ以外のテーマは、私の思い付きで始めているものもありますし、学生の提案で始めたものもありますよ。
--極限作業用ロボットは、すでに原子力発電所内で活動しているのでしょうか。
現在は構想段階にあります。地域や作業内容を限定して開発しているロボットではなく、震災のような災害時に、人が立ち入ることのできない環境下で状況を把握したり、修理や撤去作業をしたり、といった活動での利用を想定しています。
そのためには、「災害現場へのロボット輸送が容易なこと」「作業環境に合わせて装備や特性を容易に変更できること」「故障した時に容易に修理できること」が大切です。よって、ロボットは容易に分解・合体できるモジュール構造としています。いろいろなモジュールを用意することで、作業環境への適応が容易となります。
従来の歩行ロボットでは困難だった、長時間の使用(省エネルギーの移動)と、不整地や災害現場のような足場の悪い環境での移動との両立を図るために、状況に応じて脚の形状を変化させることができるようにしました。足場の悪い環境での移動時にも省エネルギーで移動できるように、ほとんどの歩行ロボットで避けている「特異点」を積極的に利用する歩行を行っています。それに合わせ、関節構造も採用しています。
補足すると、特異点とは、人間の脚の場合ですと、膝関節を一直線に伸ばした状態、あるいは、膝関節を太腿と脛とが重なるように180度折り曲げて正座した状態のことです。つまり、太腿と、脛が一直線になった状態です。極限作業用ロボットでは、後者の状態を利用しています。人は「特異点」を利用し、疲れないように歩行していますが、多くの歩行ロボットは制御が難しいので「特異点」を避けて歩行しています。
極限作業用ロボットでは、人と同じようにその特異点を利用して、エネルギー効率の良い歩行を実現しています。ホンダのASIMOを始めとして、すべてのヒューマノイドロボットが膝関節を曲げて歩行しているのは、この特異点を避けているためです。そのため、ヒューマノイドの歩行は、人の歩行と異なって見えるのです。
--従来のロボットと比較し、より人間に近い歩行ができるのですね。これまでの関節があるロボットとは、どのような点が異なっているのでしょうか。
多くの多脚歩行ロボットの足部と路面との接触は「点接触」なのですが、極限作業用ロボットは展開・収縮可能な補助足部を持つことにより、点接触にも線接触にも対応します。線接触にすることで、複雑な制御をすることなく、歩行安定性を大幅に向上させることができます。
これら、分解・合体ができること、変形できること、特異点を利用して歩行すること、補助足部は既存のロボットにはない、極限作業用ロボットの特徴となっています。
--人が行える分野は人が、人が対応できない分野はロボットが代替し、高性能を発揮する、という、実用的なロボット活用がイメージできました。研究を行ううえで信条とされていることはありますか。
人を幸せにするものは、それが1つあるだけでは不十分で、誰でもつくることができ、多くの人が手にすることができるものでなければなりません。そのためには、もののつくり方が重要である考え、設計方法を提案することが研究室のテーマです。
設計対象は、極端な話、人生設計でも良いと考えており、過去には、ゲームやAndroidアプリの設計も行いました。でも、私の専門分野は機構や機械要素なので、人との係りを意識したロボット機構の設計が多いです。
◆習字の達人も夢じゃない? スキルアシストシステムの可能性
--人生設計も設計の対象、とのこと。設計の定義は幅広いですね。人工知能(AI)やロボット工学は、これからの未来を生きる子どもや受験生にとって興味深いテーマのひとつです。たとえば、AIとスムーズに会話できるようになったり、全自動の手術ロボットが登場したり…。樋口教授の研究テーマは、わたしたちの生活には具体的にどのような変化をもたらす可能性がありますか。
前提で触れた、力を入れて取り組んでいる「スキルアシストシステム」は、ロボット操作が初めての人や知識やない人でも、作業者の持つ感性を損なうことなく熟練者のような作業を行うことができるように、ロボットが人の作業をアシストしてくれるシステムです。
たとえば、習字が苦手な子が、自分で考えるイメージで、達人のような文字が書けるようにロボットがアシストしてくれたりします。習字を練習するための練習システムとしても活用できますし、後継者不足の伝統工芸や、高いスキルが必要な手術や、料理などの作業を、身近なものにすることができるシステムです。
--冬休みの宿題も楽々…という日が実現するかもしれませんね。
そうですね。でも、ロボットを使いながらコツを覚えていき、最終的にはアシストシステムなしで、人だけで作業ができるようになることが理想です。失敗しながら覚えるのではなく、成功体験を通じて質の高い作業を覚えることができるはずです。人だけでも、ロボットだけでも、実現できない、より高いスキルの作業を行うことで、今まで実現が困難だったものづくりを行うことができるようになると思います。

樋口研究室の研究内容「4足歩行ロボット」
それから、極限作業用の4足歩行ロボットは、歩行ロボットをより身近なものにしてくれると思います。また、その開発に用いられている、個々の要素技術は、他の形式の歩行ロボット、例えばヒューマノイドロボットや、能動的に動く歩行装具などにも適用でき、多くの歩行ロボットの性能の向上につながると考えています。
人にしか行えなかった危険な作業が、歩行ができることで、ロボットに置き換えることができますので、消防や警察の危険な業務をロボットが行うようになるかもしれません。掃除はロボットによる自動化が進んでいる分野ですが、掃除機による掃き掃除以外の掃除の多くがロボットで行えるようになると思います。
◆プログラミング言語は道具、必要なのは使い方
--国内では今、2020年のプログラミング教育必修化に向け、プログラングに関する興味関心が高まっています。これから先、子どもが理工系に進む場合、やはりプログラミングに関する知識は必須でしょうか。
ロボットは部分的であれ、自律して動かなければ意味がありません。そのためには、あらかじめ、周囲の状況や人からの指令に対する動き方を決めておく必要がありますし、その動き方に従ってロボットを制御する仕組みが必要になります。これらはいずれもプログラミングであり、ロボットには必要不可欠なものです。
これらを具体的に構成する手段(道具)は、リンクや歯車を用いた機械的な方法や電気回路を用いた電気的な方法のようなハード的な方法のほか、コンピュータを用いたソフト的な方法もあります。そのため、機構設計もプログラミングの一部といえます。これらのいずれも、ロボットには必要不可欠なものです。
--プログラミングには、言語の習得が必要ということでしょうか。
C言語やJavaのようなコンピュータ言語を用いたプログラミングに限定すると、ハード的な方法と比べれば、これらは容易に変更・修正が可能なものなので、非常に有益な手段ですが、C言語やJavaのような言語を用いなくても、「Matlab」のようなシステム解析・シミュレーションソフトウェアを用いて同じことが行えますので、言語を使えることが必ずしも必要であるわけでもありません。
ですが、しょせんこれらは道具なので、目的を達成することができればどのような道具を使用しても問題はありません。研究室内では、研究対象と学生の特性に応じて、それぞれの道具を使い分けて研究しています。設計中心の研究を行う学生の中には、まったく言語を用いたプログラミングをせずに卒業研究を終えることがありますよ。
ではどのように研究したのかというと、Excelのような表計算ソフトを用いて計算したり、動力学シミュレーションソフトや有限要素解析ソフトを使用して運動・構造解析をしています。ロボットを制御することが中心の学生は、「Matlab」と「DSP」を組合せて制御する学生もいますし、言語を用いてプログラミングして制御する学生もいます。
結論として、言語によるプログラミングはマストではありませんが、知って使える方がベターです。ただし、方法は限定しませんが、プログラミングのいずれかの知識と技術は必要です。
◆日々驚きのある体験を
--ちょっと興味はあるけど、本格的すぎてついていけないという不安をお持ちの子どもに向けて、アドバイスはありますか。
ロボット工学の魅力とは、テレビやマンガで見たロボットを、自分の発想で、自分の手で作り上げることができることです。プラモデルは動きませんし、市販ロボットは他人がデザインしたものでしかありません。やはり、自分のオリジナルデザインで、自分が格好良いと思えるデザインで、こだわりや遊び心も盛り込んだ、自分の好きな新しいものをつくることができるところが、大きな魅力だと思います。
それと、ロボット工学に特別な向き・不向きはないと思います。ロボット工学に限らず、どの学問であっても、新しいことに挑戦する意欲や、諦めず、継続して物事を続けることができる意志の強さ、何事にも興味を持つ好奇心などは、大切なことだと思います。
大切なことは、客観的に「向いている」「向いていない」の判断をすることでも、誰かの言った「向いている」「向いていない」を参考に自分の進路を決めることでもありません。大切なのは、自らが、それをやりたいと思う気持ちがあるかどうかです。どんな学問でも、やりたいと思う気持ちがある人には、知識や技術を身に付けることができると思います。
研究室では、毎日必ず、前日とは違っている何かがあります。それは、自分がつくったものあれば、同じ研究室のメンバーがつくったものもあります。また、研究のためにつくったものあれば、趣味でつくったものや、研究室を快適にするためにつくったもの、目的がなんであるか分からないものまで、いろいろなものがあります。毎日が新鮮で、飽きることがありません。是非、毎日新しい驚きのある体験をしてほしいと思います。
--ありがとうございました。
◆実践的な学びを実現する2つの取組み
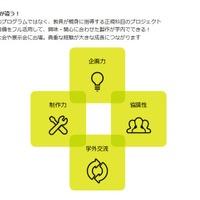
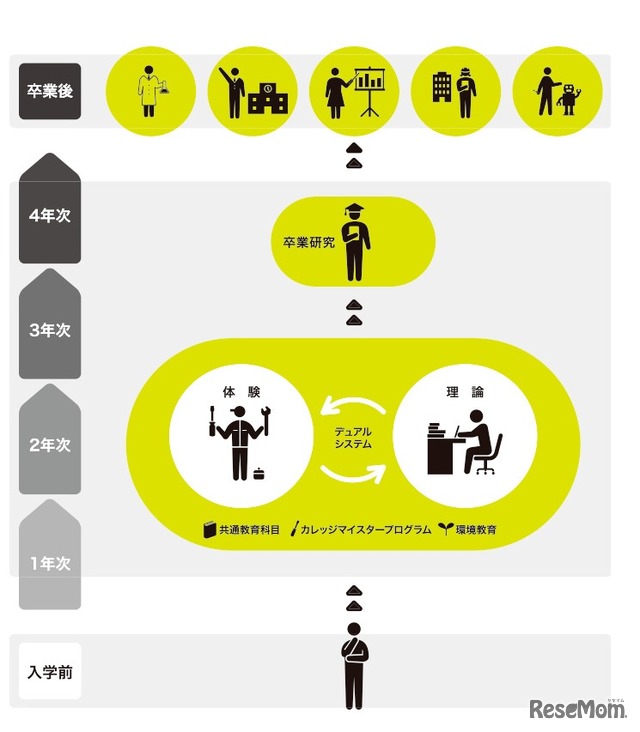
日本工業大学が提供するカリキュラムの特徴は、「デュアルシステム」と「カレッジマイスタープログラム」にある。
デュアルシステム
デュアルシステムでは、1年次から理論と体験を組み合わせた経験の機会を提供する。座学で学んだ内容を、実験、実習、製図といった実体験に生かし、学問的な知識をより体系的な経験へと昇華させる仕組みだ。現場で発見した課題や疑問を講義に持ち帰り、さらなる理解を深めることができる。
カレッジマイスタープログラム
「大学での卓越した技術者・職人」という意味を持つカレッジマイスタープログラムでは、基盤教育や専門教育で学んだ工学の知識を生かし、個人やチームでものづくりに挑戦することを奨励。デュアルシステムで得た経験をもとに、世界的な大会や研究発表会に臨むチャンスを提供する。学生の熱意を支えようと、教授はもちろん、教員が一丸となって学生を親身にサポートする点も心強い。
樋口教授が研究室を置く先進工学部ロボティクス学科のほか、同学部では体験型映像コンテンツを扱う大山麻里教授による研究室が所属する情報メディア工学科も門戸を開いている。情報メディア工学科では、未来のインターネットを形づくる最新の技術・表現技法を習得することができる。工学に少しでも興味がある、または持った場合は、すでに6月から開催されているオープンキャンパスに参加してみるとよいだろう。受験生向けの工学体験ツアーだけでなく、保護者向けの大学紹介も用意し、学生や教員全員が日本を支える"未来のエンジニア"と会えることを心待ちにしている。
大学全体や学部・学科概要のほか、入試要項や入試のポイント、オープンキャンパス情報の詳細はすべて日本工業大学Webサイトで確認できる。
--
【日本工業大学オープンキャンパス/新学部学科説明会】
日程:2017年7月15日(土)、8月5日(土)・6日(日)・19日(土)、9月10日(日)
時間:各日11:00~16:30(ランチ付)
※2018年3月24日(土)には新高校2・3年生向けに実施予定。時間は11:00~16:30
おもなプログラム:Hello New NIT!、工学体験ツアー、女子学生にきこう「NIKOJOライフ」、保護者も安心「大学紹介」など